问题定义
-
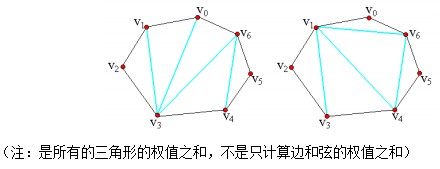
凸多边形的三角剖分:将凸多边形分割成互不相交的三角形的弦的集合T
-
最优剖分:给定凸多边形P,以及定义在由多边形的边和弦组成的三角形上的权函数w。要求确定该凸多边形的三角剖分,使得该三角剖分中诸三角形上权之和为最小。
凸多边形三角剖分如下图所示:
最优子结构
若凸(n+1)边形P={V0,V1……Vn}的最优三角剖分T包含三角形V0VkVn,1<=k<=n,则T的权为三个部分权之和:三角形V0VkVn的权,多边形{V0,V1……Vk}的权和多边形{Vk,Vk+1……Vn}的权之和。如下图所示:
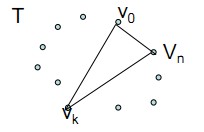
可以断言,由T确定的这两个子多边形的三角剖分也是最优的。因为若有{V0,V1……Vk}和{V0,V1……Vk}更小权的三角剖分,将导致T不是最优三角剖分的矛盾。因此,凸多边形的三角剖分问题具有最优子结构性质。
递推关系
设t[i][j],1<=i<j<=n为凸多边形{Vi-1,Vi……Vj}的最优三角剖分所对应的权值函数值,即其最优值。最优剖分包含三角形Vi-1VkVj的权,子多边形{Vi-1,Vi……Vk}的权,子多边形{Vk,Vk+1……Vj}的权之和。
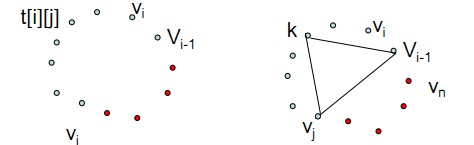
因此,可得递推关系式: \(t[i][j]=\left\{\begin{array}{ll} {0} & {\mathrm{i}=\mathrm{j}} \\ {\min _{i \leqslant k<j}\left\{t[i][k]+t[k+1][j]+w\left(v_{i-1} v_{k} v_{j}\right)\right\}} & {\mathrm{i}<\mathrm{j}} \end{array}\right.\) 凸(n+1)边形P的最优权值为t[1][n]。
代码
//3d5 凸多边形最优三角剖分
#include "stdafx.h"
#include <iostream>
using namespace std;
const int N = 7;//凸多边形边数+1
int weight[][N] = {{0,2,2,3,1,4},{2,0,1,5,2,3},{2,1,0,2,1,4},{3,5,2,0,6,2},{1,2,1,6,0,1},{4,3,4,2,1,0}};//凸多边形的权
int MinWeightTriangulation(int n,int **t,int **s);
void Traceback(int i,int j,int **s);//构造最优解
int Weight(int a,int b,int c);//权函数
int main()
{
int **s = new int *[N];
int **t = new int *[N];
for(int i=0;i<N;i++)
{
s[i] = new int[N];
t[i] = new int[N];
}
cout<<"此多边形的最优三角剖分值为:"<<MinWeightTriangulation(N-1,t,s)<<endl;
cout<<"最优三角剖分结构为:"<<endl;
Traceback(1,5,s); //s[i][j]记录了Vi-1和Vj构成三角形的第3个顶点的位置
return 0;
}
int MinWeightTriangulation(int n,int **t,int **s)
{
for(int i=1; i<=n; i++)
{
t[i][i] = 0;
}
for(int r=2; r<=n; r++) //r为当前计算的链长(子问题规模)
{
for(int i=1; i<=n-r+1; i++)//n-r+1为最后一个r链的前边界
{
int j = i+r-1;//计算前边界为r,链长为r的链的后边界
t[i][j] = t[i+1][j] + Weight(i-1,i,j);//将链ij划分为A(i) * ( A[i+1:j] )这里实际上就是k=i
s[i][j] = i;
for(int k=i+1; k<j; k++)
{
//将链ij划分为( A[i:k] )* (A[k+1:j])
int u = t[i][k] + t[k+1][j] + Weight(i-1,k,j);
if(u<t[i][j])
{
t[i][j] = u;
s[i][j] = k;
}
}
}
}
return t[1][N-2];
}
void Traceback(int i,int j,int **s)
{
if(i==j) return;
Traceback(i,s[i][j],s);
Traceback(s[i][j]+1,j,s);
cout<<"三角剖分顶点:V"<<i-1<<",V"<<j<<",V"<<s[i][j]<<endl;
}
int Weight(int a,int b,int c)
{
return weight[a][b] + weight[b][c] + weight[a][c];
}